 Dr. Moble Benedict, assistant professor in the Department of Aerospace Engineering at Texas A&M University, has received a five-year, $750,000 grant from the U.S. Army, U.S. Navy and NASA that will allow him to study the upward scalability of revolutionary vertical takeoff and landing (VTOL) concepts for UAS applications. The grant was awarded as part of the University of Maryland’s Vertical Lift Research Center of Excellence.
Dr. Moble Benedict, assistant professor in the Department of Aerospace Engineering at Texas A&M University, has received a five-year, $750,000 grant from the U.S. Army, U.S. Navy and NASA that will allow him to study the upward scalability of revolutionary vertical takeoff and landing (VTOL) concepts for UAS applications. The grant was awarded as part of the University of Maryland’s Vertical Lift Research Center of Excellence.
In the proposed research, “Scalable Novel Configurations for UAS Applications,” the goal is to conduct experimental and computational studies to develop a fundamental understanding of the upward scalability on rotor aeromechanics, vehicle dynamics and empty weight fractions of revolutionary flying concepts such as cycloidal rotors, flapping wings and quad biplane.
 Developing the next generation of UASs requires vehicles that are compact, hover-efficient, high speed capable, quiet, highly maneuverable and gust tolerant. Over the past 10 years, Benedict has been conducting pioneering research on a myriad of out-of-the-box hover-capable micro aerial vehicle (MAV) concepts, such as cycloidal rotors and flapping wings.
Developing the next generation of UASs requires vehicles that are compact, hover-efficient, high speed capable, quiet, highly maneuverable and gust tolerant. Over the past 10 years, Benedict has been conducting pioneering research on a myriad of out-of-the-box hover-capable micro aerial vehicle (MAV) concepts, such as cycloidal rotors and flapping wings.
The cycloidal rotor is a revolutionary propulsion system that utilizes a horizontal axis of rotation with the blade span parallel to this axis. With the blades cyclically pitched so that each blade has a positive geometric angle of attack at the top and bottom of the circular trajectory, a net lift is produced. Previous studies by Benedict have shown that a cycloidal rotor can achieve higher hover efficiency than a conventional rotor at smaller scales, possibly due to uniform aerodynamic conditions along the blade span and the favorable unsteady mechanisms.
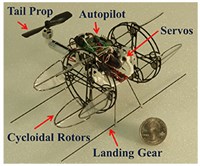 Traditional UAVs with helicopter rotors are limited in forward flight speed due to the rotor operating in an edge-wise flow. The cyclocopter can perform efficient high-speed forward flight by modulating the blade-pitch schedule. Unlike a traditional hybrid aircraft (tilt-rotor), a cyclocopter can transition from hover to high-speed forward flight without any configuration change due to its capability to vector thrust. Although such a device was first envisioned over 100 years ago, a lack of systematic scientific study and limited technology prevented the idea from getting off the ground.
Traditional UAVs with helicopter rotors are limited in forward flight speed due to the rotor operating in an edge-wise flow. The cyclocopter can perform efficient high-speed forward flight by modulating the blade-pitch schedule. Unlike a traditional hybrid aircraft (tilt-rotor), a cyclocopter can transition from hover to high-speed forward flight without any configuration change due to its capability to vector thrust. Although such a device was first envisioned over 100 years ago, a lack of systematic scientific study and limited technology prevented the idea from getting off the ground.
Thanks to advances in electronics and material sciences, the first working cyclocopter was built and flown by Benedict in 2011 at the University of Maryland. Recently, the world’s smallest cycloidal-based rotorcraft was designed, built and test flown successfully at the Advanced Vertical Flight Laboratory (AVFL) at Texas A&M. Weighing only 29 grams, it utilizes the latest advances in microelectronics technology and carbon fiber composite construction, as well as extensive experimental data for design and optimization.
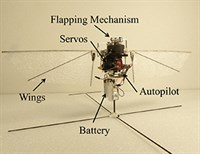 Biological flapping wings offer superior maneuverability with excellent gust tolerance and disturbance rejection capabilities compared to that of man-made MAVs. AVFL has successfully designed, built and flight-tested a 62-gram hummingbird-inspired flapping wing MAV with hovering capability. This is only the second vehicle of this type ever created along with the DARPA-funded Nano Hummingbird by Aerovironment.
Biological flapping wings offer superior maneuverability with excellent gust tolerance and disturbance rejection capabilities compared to that of man-made MAVs. AVFL has successfully designed, built and flight-tested a 62-gram hummingbird-inspired flapping wing MAV with hovering capability. This is only the second vehicle of this type ever created along with the DARPA-funded Nano Hummingbird by Aerovironment.
 It is the first of its kind to be developed specifically for the purpose of scientifically investigating the flight dynamics, aerodynamics and control of an actual flying vehicle utilizing this form of aerial locomotion. This vehicle is unlike most other flapping wing MAVs in that it is capable of truly stationary hovering flight. The stabilization and control is accomplished through wing kinematic modulation mechanisms without external vanes, fins or control surfaces.
It is the first of its kind to be developed specifically for the purpose of scientifically investigating the flight dynamics, aerodynamics and control of an actual flying vehicle utilizing this form of aerial locomotion. This vehicle is unlike most other flapping wing MAVs in that it is capable of truly stationary hovering flight. The stabilization and control is accomplished through wing kinematic modulation mechanisms without external vanes, fins or control surfaces.
This research project is motivated by Benedict’s prior studies, which showed that the concepts of cycloidal rotors, flapping wings and quad-biplane have unprecedented performance over conventional helicopters at small scales. The objective will be to examine whether these concepts are feasible at larger scales for specific missions and how far these performance benefits persist with scales.
 More information on Benedict’s research can be found at Advanced Vertical Flight Lab website.
More information on Benedict’s research can be found at Advanced Vertical Flight Lab website.